
קבוצת חוקרות וחוקרים מהנדסה הצליחו לחקות עיקרון פעולה של חרקים ולתרגם אותו להרמה ומיקום חפצים קטנים מתחת למים בעזרת גשרים קפילריים
המחקר פורסם במגזין ACS Applied Materials & Interfaces.
חרקים רבים יכולים לכלוא ולייצב בועות אוויר מתחת למים על ידי זיפים זעירים דוחי מים (הידרופוביים או סופרבידרופוביים) המכסים את גופם. כשבועות אלו מגיעות במגע עם משטחים, הן יוצרות גשרים קפילריים שיכולים לשמש כ"דבק", ואפילו מאפשרות לחרקים מסוימים ללכת מתחת למים על ידי היצמדות למשטחים בצורה מבוקרת והפיכה.
קבוצת המחקר במעבדה לביומימטיקה של מערכות מכניות ופני שטח בהובלת ד"ר בת-אל פנחסיק מבית הספר להנדסה מכנית, בנו זרוע רובוטית עם ראש מיוחד שהודפס בתלת מימד אשר יכול לייצב בועות אוויר על מנת ליצור גשרים קפילריים או נימיות בעברית (היכולת של נוזלים "לטפס" במעלה צינורות דקים., בהיעדר כוחות חיצוניים ולעיתים אף בניגוד אליהם, לדוגמה, בניגוד לכוח הכבידה) מתחת למים.
בצורה הזו, בדומה לחרקים, הצליחה קבוצת המחקר להראות שניתן להשתמש בגשרים קפילריים של אוויר על מנת להרים ולמקם חפצים רבים קטנים (מ"מ ופחות) וקלים מתחת למים שלא ניתן להרים ולשחרר בדרך אחרת. למשל, יריעות דקות, משטחים מחוררים או מחוספסים, חלקיקים זעירים בגיאומטריות שונות, לכלוך ועוד.
בנוסף, החוקרים/ות הראו שניתן לקפל יריעות דקות מתחת למים, בדומה לאוריגמי, על ידי שימוש בבועות אוויר. ככל הידוע, לא קיים מנגנון הדבקה או אחיזה אשר מסוגל לבצע את כל הפעולות הללו על מגוון כה גדול של חלקיקים וחפצים מזעריים, וזאת ללא שימוש בדבק ובצורה מדויקת, הפיכה ופשוטה.
הזרוע הרובוטית יכולה לשמש באוטומציה של ניסויים עם תאים ביולוגיים בסביבה מימית, התקנים מיקרונים בסביבת נוזלים, מניפולציה וסידור של חפצים קטנים מתחת למים וניקוי משטחים אשר טבולים בנוזל.
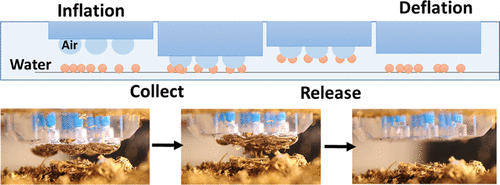
באיור: רובוט המרים חלקיקי מתכת מתחת למים על ידי בועות אוויר שיוצרות גשרים קפילריים עם החלקיקים. עם שאיבת האוויר- החלקיקים משתחררים.
בניגוד למנגנוני אדהזיה (הדבקה/הצמדה) המבוססים על דבק, במקרה הזה אין שימוש בכימיקלים ולכן במקרים שבהם זיהומים הם סיכון משמעותי, לא ניתן להכניס חומרים זרים לסביבת העבודה, כמו במקרה של ניסויים רפואיים. כמו כן, הזרוע הרובוטית של קבוצת המחקר פותחת את האפשרות לנקות את סביבת העבודה הנוזלית מחלקיקי מזהמים, דבר שלא ניתן לביצוע על ידי זרועות רובוטיות קונבנציונאליות.
"במחקר אצלנו בקבוצה אנחנו מחפשים מערכות מעניינות בטבע, בעיקר אצל חרקים, כדי לקבל השראה לפיתוח של מערכות רובוטיות קטנות או כאלו שעושות שימוש בעקרונות פיזיקליים המשמשים את החרקים בטבע על מנת לשרוד ולבצע פעולות חשובות באוויר או במים. לשם כך, יש בקבוצה סטודנטים/יות מהנדסה מכנית, הנדסה ביו-רפואית, הנדסת חומרים ופיסיקה. זה מה שנותן לנו יתרון גדול במחקר שהוא רב-תחומי ובמציאת רעיונות לא שגרתיים ופתרונות יצירתיים בתחום הרובוטיקה והחומרים" אומרת ד"ר בת-אל פנחסיק.
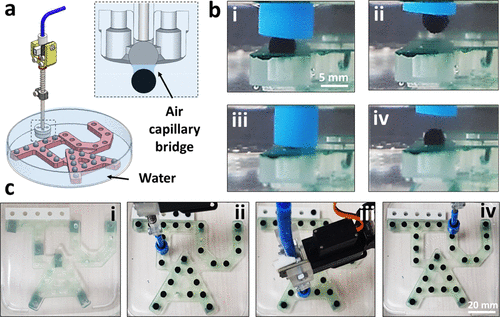
באיור: הרובוט מסדר בצורה אוטונומית כדורים מילימטרים מתחת למים בצורה שהוגדרה לו מראש (TAU). הוא מרים את הכדורים על ידי גשרים קפילריים של אוויר ומשחרר אותם על ידי שאיבת האוויר.
המחקר פורסם השבוע וזכה להופיע על שער העיתון היוקרתי ACS Applied Materials & Interfaces.
ידיעות נוספות בנושא


