
הרובוט שפועל מתחושה פנימית
ד"ר אבישי סינטוב פיתח מכשיר לביש היודע לזהות תבניות שונות של תנועות שרירי האמה דרך תנועות אינטואיטיביות ולחזות כוונת משתמש בעת שיתוף פעולה אדם-רובוט
ד"ר אבישי סינטוב פיתח מכשיר לביש היודע לזהות תבניות שונות של תנועות שרירי האמה דרך תנועות אינטואיטיביות ולחזות כוונת משתמש בעת שיתוף פעולה אדם-רובוט


שיתוף פעולה אפשרי בין אדם לרובוט מחייב הבנה אינטואיטיבית ומתמשכת של תנועה אנושית במשימות משותפות.
רוב הפעולות האינטואיטיביות של בני אדם הן פעולות שאדם הורגל לבצען באופן מסוים מילדות וכך גם הוא יכול לחזות תנועה של בני אדם אחרים.
כאשר אדם מסייע לחברו, פעולות מסוימות יכולות להתבצע אינטואיטיבית ללא תקשורת ורבאלית למשל הגשת כוס קפה תגרום לאדם מולך להושיט באופן אינטואיטיבי את ידו ולתפוס את הכוס. בעצם המסייע מתבונן בידיו של חברו ויכול לחזות את כוונתו דרך זיהוי הכלים שהוא אוחז ומסלול תנועתו – ואז לבצע פעולות תומכות. מימוש עקרון זה ע"י רובוט הוא הבסיס לעבודת רובוטים עם בני-אדם.
פרסום מאמר
לאחרונה, התקבל בכתב העת IEEE Robotics & Automation Letters מאמרם של נדב כהנוביץ', סטודנט לתואר שני בהנדסה מכנית וד"ר אבישי סינטוב.
ד"ר סינטוב עומד בראש מעבדת הרובוטיקה ROB-TAU בבית הספר להנדסה מכנית של אוניברסיטת תל אביב, בה הוא וצוותו עוסקים בחיזוי כוונת אדם בעת שיתוף פעולה עם רובוטים.
במאמרם הראו החוקרים כי בעזרת מכשיר לביש פשוט וזול, ניתן לזהות תבניות שונות של תנועות שרירי האמה. המכשיר מכיל 15 חיישני כוח זולים אשר נצמדים לעור האמה וחשים את התכווצות השרירים בעת אחיזה של חפצים שונים וביצוע פעולות.
בעזרת אלגוריתמי למידת מכונה, זרוע רובוטית יכולה לקבל מידע על החפץ הנאחז בזמן אמת ובדיוק גבוה, ולחזות את כוונת המשתמש. האלגוריתם כולל רשת עצבית המאומנת לסווג את המידע מהמכשיר ותהליך איטרטיבי לשיפור דיוק החיזוי עם כניסת מידע חדש בזמן אמת.
החוקרים הראו שהאלגוריתם מאפשר חסינות (רובסטיות) למיקום והידוק המכשיר על האמה. חיזוי כוונת המשתמש מאפשר תכנון תנועה של הרובוט לסיוע יעיל ומהיר לאדם. גישה זאת מאפשרת עבודה אינטואיטיבית עם רובוט ללא שימוש בתקשורת ורבאלית וללא מצלמות.
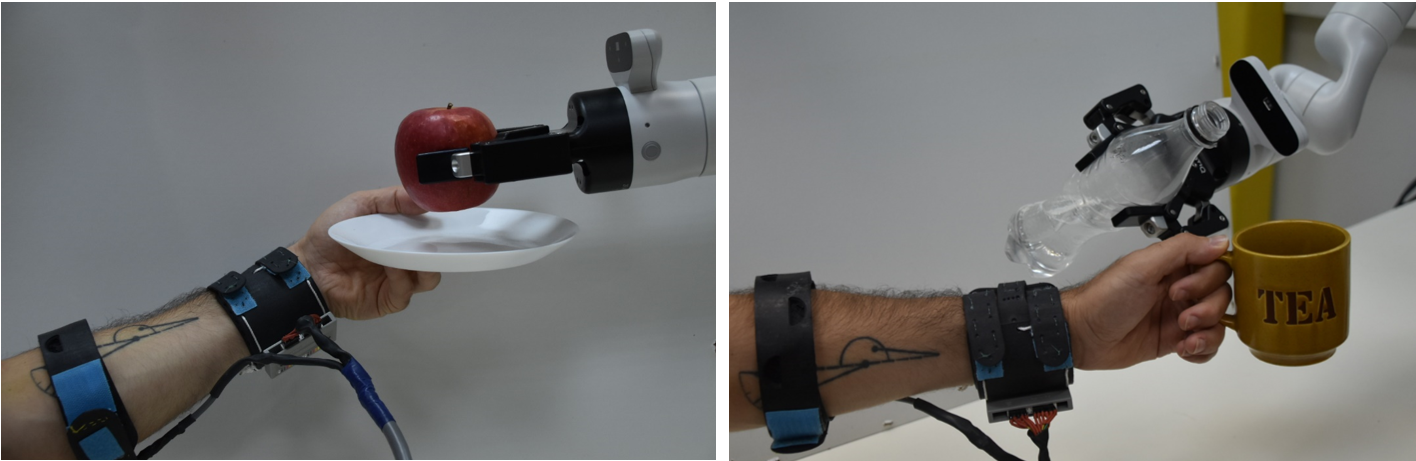
בתמונה: רובוט מסייע למשתמש הלובש את המכשיר לאחר זיהוי החפץ ביד
ראייה לעתיד
טכנולוגיה זאת תוכל בעתיד לאפשר סיוע לבעלי מוגבלויות בפעולות יומיומיות – לדוגמא, זרוע רובוטית תומכת המעוגנת על כיסא גלגלים, עבודה לצד פועלים במפעל ואף סיוע לרופאים בהליכים רפואיים – רובוט שיחליף אח/ות ויסייע למנתח.
המחקר מתבצע במימון הקרן הישראלית למדע (ISF).
אלה שמתאהבים בבעיה הם אלה שממציאים לה פתרון
מחקרים אחרונים


